
Konveyor Reverse - Forward Menggunakan Sensor PIR Berbasis ARM
Dia Nur Alamsyah 1, Hartini 2, Taufiq
Arrasyid 3, Samuel BETA4
Prodi Teknik Elektronika
Jurusan Teknik Elektronika Politeknik Negeri Semarang
Jl. Prof. H. Soedarto, SH, Tembalang, Semarang, 50275
Intisari
- Konveyor merupakan salah satu jenis
alat pengangkut yang berfungsi untuk mengangkut material atau barang atau
manusia secara horizontal atau vertical dan digerakkan oleh motor penggerak
atau gravitasi.Fungsi Belt conveyor merupakan pesawat pengangkut yang digunakan
untuk berjalan atau memindahkan manusia dalam bentuk satuan atau curah dengan
arah horizontal dari suatu sistem operasi yang satu ke system operasi yang lain
dalam suatu line proses yang menggunakan belt sebagai penghantar manusia
tersebut. Maka dalam proyek ini dibuatlah aplikasi ARM (Advanced RISC Machine) menggunakan
masukan sensor PIR dan luaran Motor DC. Sensor
PIR sebagai masukan yang akan mendeteksi benda yang berada di depannya, dan
luaran Motor Dc sebagai output atau penggerak belt konveyor. Sedangkan ARM
sebagai kontroler dan pemroses sinyal.
Kata Kunci : ARM, Sensor PIR,
Motor DC
Abstract – Conveyor is one type of conveyance which serves to transport materials or goods or human horizontally or vertically and is driven by the motor or gravitasi.Fungsi Belt conveyor is a transport aircraft used to walk or move humans in the form of units or bulk to the horizontal direction of an operating system that one operating system to another in a line process which uses belt as a conductor of humans. So in this project was made applications ARM (Advanced RISC Machine) using a PIR sensor inputs and outputs DC motor. PIR sensor as an input that will detect objects that are in front of him, and Motor Dc output as an output or drive belt conveyors. While ARM as a controller and signal processing.
I. Pendahuluan
1.1 Latar Belakang
Perkembangan jaman yang semakin canggih membuat alat
alat yang diciptakannya juga semakin bagus, dan canggih, seperti belt conveyor
ini. Sejarah belt conveyor atau ban berjalan dimulai pada paruh kedua abad
ke-17. Sejak itu, ban berjalan telah menjadi bagian terpenting transportasi
material. Tapi itu pada tahun 1795 bahwa
ban berjalan atau belt conveyor menjadi alat populer untuk menyampaikan bahan
massal. mengingat keterbatasan kemampuan tenaga manusia baik itu berupa
kapasitas bahan yang akan diangkut maupun keselamatan kerja dari manusia
itu sendiri. Proses pemindahan material
atau material handling merupakan proses pemindahan material atau barang dengan
menggunakan metode dan peralatan tertentu. Salah satu jenis alat transportasi
untuk mengangkut material adalah conveyor.
Conveyor digunakan pada berbagai industri sebagai
transportasi berbagai material dalam lingkungan industri tersebut. Conveyor
juga di gunakan untuk berjalannya manusia. Perkembangan mengenai teknologi
conveyor sudah banyak di desain dengan berbagai macam tipe dan fungsinya, salah
satunya adalah belt conveyor. Fungsi belt conveyor adalah untuk mengangkut
muatan satuan (unit load) atau muatan curah (bulk load) dan digunakan untuk
manusia berjalan. Maka di buatlah alat konveyor reverse forward berbasis ARM
untuk memudahkan manusia untuk berjalan dari lantai 1 ke lantai yang lainnya
dengan menghemat tenaga dan penggunaan daya.
II. Tinjauan Pustaka
Untuk
mengetahui berbagai komponen dan peralatan yang dibutuhkan, maka disusunlah
tinjauan pustaka sebagai acuan dalam merancang dan membuat aplikasi menggunakan ARM cortexM0 ini :
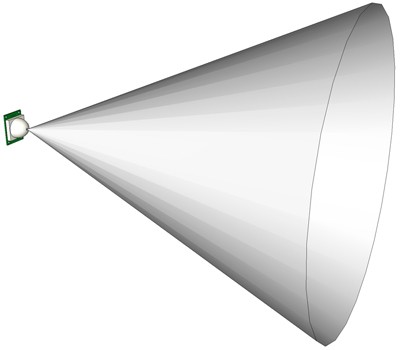
A. Sensor PIR
PIR (Passive Infrared Receiver) merupakan sebuah sensor
berbasiskan infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan
yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun
seperti IR LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya merespon
energi dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda
yang terdeteksi olehnya. Benda yang bisa dideteksi oleh sensor ini biasanya
adalah tubuh manusia.
Di dalam sensor PIR ini terdapat bagian-bagian yang mempunyai perannya
masing-masing, yaitu Fresnel Lens, IR Filter, Pyroelectric sensor, amplifier,
dan comparator.
Sensor PIR ini bekerja dengan
menangkap energi panas yang dihasilkan dari pancaran sinar inframerah pasif
yang dimiliki setiap benda dengan suhu benda diatas nol mutlak. Seperti tubuh
manusia yang memiliki suhu tubuh kira-kira 32 derajat celcius, yang merupakan
suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah
inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti
dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari
galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik.
Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar inframerah pasif
ini membawa energi panas. Mengapa sensor PIR hanya bereaksi pada tubuh manusia
saja? Hal ini disebabkan karena adanya IR Filter yang menyaring panjang gelombang
sinar inframerah pasif. IR Filter dimodul sensor PIR ini mampu menyaring
panjang gelombang sinar inframerah pasif antara 8 sampai 14 mikrometer,
sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar
antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor.

Jadi, ketika
seseorang berjalan melewati sensor, sensor akan menangkap pancaran sinar
inframerah pasif yang dipancarkan oleh tubuh manusia yang memiliki suhu yang
berbeda dari lingkungan sehingga menyebabkan material pyroelectric bereaksi
menghasilkan arus listrik karena adanya energi panas yang dibawa oleh sinar
inframerah pasif tersebut. Kemudian sebuah sirkuit amplifier yang ada
menguatkan arus tersebut yang kemudian dibandingkan oleh comparator sehingga menghasilkan
output.
Ketika
manusia berada di depan sensor PIR dengan kondisi diam, maka sensor PIR akan
menghitung panjang gelombang yang dihasilkan oleh tubuh manusia tersebut.
Panjang gelombang yang konstan ini menyebabkan energi panas yang dihasilkan dapat
digambarkan hampir sama pada kondisi lingkungan disekitarnya. Ketika manusia
itu melakukan gerakan, maka tubuh manusia itu akan menghasilkam pancaran sinar
inframerah pasif dengan panjang gelombang yang bervariasi sehingga menghasilkan
panas berbeda yang menyebabkan sensor merespon dengan cara menghasilkan arus
pada material Pyroelectricnya dengan besaran yang berbeda beda. Karena besaran
yang berbeda inilah comparator menghasilkan output.

Jadi sensor
PIR tidak akan menghasilkan output apabila sensor ini dihadapkan dengan benda
panas yang tidak memiliki panjang gelombang inframerah antar 8 sampai 14
mikrometer dan benda yang diam seperti sinar lampu yang sangat terang yang
mampu menghasilkan panas, pantulan objek benda dari cermin dan suhu panas ketika
musim panas.
B. Motor Dc
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.
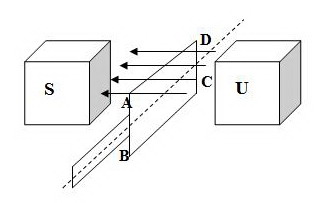
Prinsip Kerja Motor DC

Kumparan
ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan
CB yang terletak tepat lurus arah fluks
magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga
apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD
akan berputar.
Hasil
perkalian gaya dengan jarak pada suatu titik tertentu disebut momen, sisi aktif
AD dan CB akan berputar pada porosnya karena pengaruh momen putar (T). Setiap
sisi kumparan aktif AD dan CB pada gambar diatas akan mengalami momen putar
sebesar :

Dimana :
T = momen
putar (Nm)
F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah
dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya
lorentz. Hal ini berarti bahwa kedudukan garis netral sisi-sisi kumparan akan
berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu
ditambah jumlah kumparan yang digunakan. Kumparan-kumparan harus diletakkan
sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan
saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis,
maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang
disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar.
Adapun arus
listrik yang melewati kumparan akan menyebabkan terbentuknya GGL lawan (Eb)
pada kumparan sebesar :

Dimana :
Eb =
GGL lawan (volt)
P = jumlah kutub-kutub motor
a = jumlah cabang sisi kumparan
n = jumlah penghantar
Ф = fluks per kutub (maxwell)
P = jumlah kutub-kutub motor
a = jumlah cabang sisi kumparan
n = jumlah penghantar
Ф = fluks per kutub (maxwell)
C. ARM CortexM0
ARM adalah prosesor dengan arsitektur set
instruksi 32bit RISC (Reduced
Instruction Set Computer) yang dikembangkan oleh ARM Holdings. ARM
merupakan singkatan dari Advanced RISC
Machine.

Gambar 7. Keluarga Mikroprosesor ARM
Mikroprosesor ARM mempunyai beberapa keluarga untuk
menjangkau berbagai aplikasi, salah satunya adalah ARM Cortex Prosesor
Embedded (ARM Cortex Embedded Processors).
Prosesor-prosesor di keluarga seri CortexM telah dikembangkan khusus untuk
domain mikrokontroler, dimana permintaan untuk kecepatan, determinasi waktu
proses, dan manajemen interrupt bersama dengan jumlah gate silikon minimum
(luas silikon yang minimum menentukan harga akhir prosesor) dan konsumsi daya
yang minimum sangat diminati, seperti ARM CortexM0 yang merupakan
prosesor untuk menggantikan aplikasi mikrokontroler 8/16bit dengan tipe ARM
NUC120
ARM NUC120 merupakan sebuah modul
mikrokontroler 32-bit berbasis ARM CortexM0.
ARM NUC 120 BOARD dilengkapi dengan program bootloader sehingga tidak
membutuhkan divais programmer terpisah. NUC120 dapat beroperasi dengan
kecepatan CPU sampai 48MHz. Telah dilengkapi dengan Full Speed USB 2.0 Device
Controller yang sangat fleksibel dan dapat dikonfigurasi untuk berbagai
aplikasi berbasis USB.

Gambar 8. DT-ARM NUC120RDBN
Spesifikasi :
- Berbasis NUC120RD2BN dengan Flash memory APROM sebesar 64 Kbyte, 8 Kbyte SRAM, 4 Kbyte Data Flash.
- Memiliki kemampuan IAP (In Applicaton Programming) dan ISP (In System Programming) melalui bootloader software pada LDROM
- Tersedia jalur SWD (Serial Wire Debug) yang dapat digunakan untuk debugging serta programming.
- Dapat diprogram langsung melalui jalur USB.
- Mendukung Peripheral DMA mode.
- Memiliki 8 channel ADC dengan resolusi 12 bit.
- Memiliki 4 buah timer 32 bit.
- Memiliki fungsi Watchdog dan RTC.
- Dilengkapi dengan 4 buah hardware PWM dengan resolusi 16 bit.
- Memiliki masing-masing 2 kanal jalur komunikasi UART, SPI, dan I2C.
- Memiliki 1 channel I2C.
- Tersedia antarmuka USB dan UART RS-485.
- Terdapat sensor suhu built-in dengan range -40 - 125°C dengan resolusi 1°C. Sensor ini
- memiliki gain -1.76mV/°C dan offset 720 mV pada suhu 0°C.
- Memiliki hingga 45 jalur GPIO yang masing-masing dapat dikonfigurasi pull-up/ pull-down resistor, repeater mode, input inverter, dan open-drain mode.
- Terdapat 22 MHz internal osilator.
- Frekuensi osilator eksternal sebesar 12 MHz dan fitur PLL sampai dengan 48 MHz.
- Frekuensi osilator eksternal sebesar 32.768 KHz yang dapat digunakan untuk fungsi RTC dan Low Power Mode.
- Tersedia rangkaian reset manual.
- Bekerja pada tegangan 3,3 – 5,5 V.
- Dilengkapi dengan regulator 3,3 V dan 5 V dengan arus maksimum 800 mA
- Tersedia pilihan catu daya input : catu daya eksternal 6,5 – 12 VDC (via regulator), catu daya eksternal 3,3 – 5,5 VDC (tanpa melalui regulator), atau menggunakan sumber catu daya dari jalur USB.
- Dilengkapi dengan regulator 3,3 V dan 5 V dengan arus maksimum 800 mA
- Tersedia pilihan catu daya input : catu daya eksternal 6,5 – 12 VDC (via regulator), catu daya eksternal 3,3 – 5,5 VDC (tanpa melalui regulator), atau menggunakan sumber catu daya dari jalur USB.
III. PERANCANGAN ALAT
A. Perangkat Keras dan Rangkaian Elektronika
Adapun
sistem yang digunakan yaitu :
1. Sensor PIR
2. Motor Dc
3. ARM
B. Blok Diagram Hubungan Komponen Utama
Blok diagram aplikasi ARM menggunakan
masukan Sensor PIR dengan luaran Motor Dc dapat dilihat pada gambar dibawah ini
:

Gambar
9. Blok Diagram Komponen Utama
1. Perancangan
hardware
Perancangan dan pembuatan elektrik ini meliputi pembuatan sensor PIR,dan Luaran Motor Dc.
2. Perancangan
software
Untuk diagram alir, program aplikasi ARM menggunakan masukan sensor PIR dan keluaran Motor Dc.
C. Perangkat Lunak
Untuk diagram alir, program aplikasi ARM
menggunakan masukan Sensor PIR dengan luaran Motor Dc

Gambar 8. Diagram Alir
Pembuatan
alat:
Dalam pembuatan
alat ini dapat dilakukan dengan beberapa tahap, yaitu:
1. Membuat
perencanaan bagan alat
2. Membuat
skematik ISIS proteus
3. Membuat
layout PCB
4. Menyusun
rangkaian sesuai skematik ISIS proteus
5. Membuat
program untuk ARM menggunakan software ARM
6. Pembuatan
kerangka alat
7. Pemasangan
rangkaian pada kerangka alat Pengujian Alat
D. DAFTAR PUSTAKA
E. BIODATA



Apabila ada
kritik, saran dan pertanyaan mengenai penelitian ini, bisa menghubungi penulis
melalui email : taufiqarrasyid23@gmail.com
Download Jurnal and Program Here
Download Jurnal and Program Here

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Tidak ada komentar :
Posting Komentar